MODUS™ Planning Suite
Avec MODUS™ Planning Suite vous maîtrisez votre MMT avec un minimum d'effort et une efficacité améliorée.
MODUS™ Planning Suite apporte aux utilisateurs de MODUS un ensemble de raccourcis automatisés servant à résoudre les fréquents défis de la programmation de pièces. Cette suite maximise l'efficacité de la tête REVO® pour MMT avec des applications logicielles spécialisées faciles à utiliser. Les applications de la MODUS™ Planning Suite permettent de planifier des trajectoires de mesure autour de composants à géométries complexes avec un minimum d'effort et une efficacité supérieure.
En exploitant à fond la technologie de planification, le logiciel propose des outils hors ligne avec un mouvement simulé pour créer le code DMIS représentant des mesures de pièces sans collision.
Trois applications modulaires sont actuellement disponibles séparément pour la plate-forme MODUS™ Planning Suite.
MODUS Blade planner
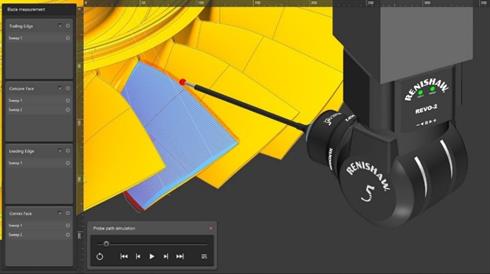
Mesure d'aubes
L'option Inspection complète d'aube dans MODUS Blade planner permet de planifier des scans par balayage sur des surfaces concaves, convexes, de bord attaque et de bord de fuite.
Les réglages et stratégies de mesure permettent à l'utilisateur de personnaliser les trajectoires de mesure tout en permettant de gérer le nombre de balayages par surface et de changer la direction des mesures de balayages de longitudinale à transversale.
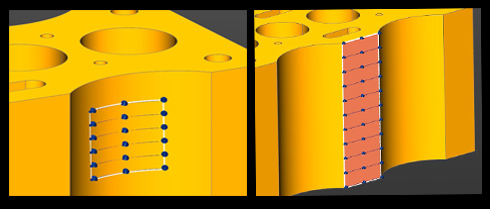
Mesure de section transversale
Le module Blade planner propose deux méthodes pour mesurer les sections d'aubes :
- Scans par balayage sur sections avec option de balayages joints.
Les scans par balayage haute densité couvrent les sections ou les données de profil d'aile sont collectées tandis que les scans par balayage basse densité interviennent entre les sections où aucune donnée n'est saisie. Cette méthode réduit également le nombre de mouvements d'approche et de retrait ce qui réduit la durée du cycle. - Scans de courbes de section sur des faces
Des scans de courbes sont créés sur les faces concaves et convexes tandis que des scans par balayage complets sont créés sur les bords d'attaque et de fuite.
MODUS™ Planning Suite génère le code DMIS nécessaire pour mesurer la surface du profil d'aile. MODUS 1.9 peut alors exécuter ce DMIS et permettre à l'utilisateur de réaliser l'analyse de profil d'aile sur chaque section.
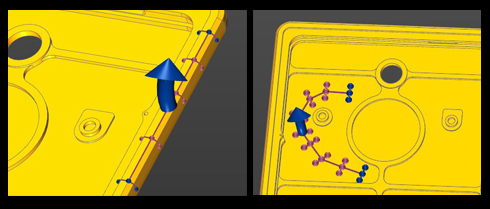
Mesure de zone
Pour fournir les outils servant à planifier la trajectoire pour l'aube entière et les surfaces environnantes, le module MODUS Blade Planner intègre toutes les méthodes de sélection disponibles dans MODUS Patch planner :
- Créer une zone à partir d'une ébauche de points (Aire)
- Sélectionner une zone à partir de faces sélectionnées (Face)
- Créer une zone à partir de points sur un axe
- Créer une zone à partir de bords CAO
Voir une description complète du module MODUS Patch planner pour MODUS™ Planning Suite ci-après.
D'autres applications modulaires sont disponibles séparément pour MODUS Planning Suite :
MODUS Patch planner
Jusqu'à présent, les utilisateurs devaient définir leurs propres trajectoires pour les balayages de surface en utilisant des outils de manipulation manuelle pour éviter les collisions. La nouvelle application MODUS Patch fournit désormais la trajectoire de mesure la plus efficace avec le capteur RSP2 REVO et ce, rapidement et facilement grâce à une planification automatique de trajectoire.
- Créer des zones à partir de points
Définir une trajectoire de balayage en créant une série de points pour créer une aire à quatre côtés sur la CAO. - Créer des zones à partir d'une face
Cliquez sur le modèle CAO pour sélectionner une surface ou l'ensemble de points de surface connectés afin de définir la zone. - Créer des zones à partir de bords CAO
Utilisez les bords CAO pour déterminer la trajectoire de balayage. Une tranche MODUS peut aussi être sélectionnée comme bord au moyen de cet outil. Le logiciel génère la trajectoire la plus courte quand les points de départ et d'arrivée sont sélectionnés. - Créer des zones en dessinant un axe
Définissez une trajectoire de balayage en créant une série de points d'axe sur une surface.
Une fois la méthode de sélection établie, des modifications de largeur, direction et autres caractéristiques du balayage peuvent être effectuées dans le menu des réglages s'il y a lieu.
D'autres applications modulaires sont disponibles séparément pour MODUS Planning Suite :
Génération de balayage point et face
Génération de balayage de bord CAO et axe
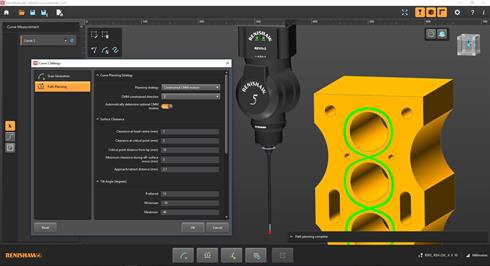
MODUS Curve planner
Le module de planification de courbe comporte deux options : RSP2 Curve et RSP3 Curve. RSP3 accroît les capacités pour mesurer des géométries complexes au moyen d'assemblages de palpeurs différents.
Les courbes peuvent être définies par la sélection de bords dans le modèle CAO ou en cliquant sur des points dans un plan.
Créer des courbes sur des bords CAO
Les courbes sont définies soit en sélectionnant des bords du modèle CAO soit des bords d'une tranche créées au moyen de MODUS.

Esquisser une courbe sur un plan
Les courbes sont définies en cliquant sur plusieurs points sur le plan. Une spline est ajustée pour créer la trajectoire.
Choix supplémentaires pour l'option de RSP2 Curve
Créer un correcteur de bord sur un plan
Une fois le plan requis sélectionné sur le modèle CAO et les bords choisis, une valeur de correction sera appliquée.
Un jeu d'options graphiques complète les réglages du logiciel ce qui permet aisément de joindre et délimiter des trajectoires et d'obtenir ainsi le résultat le plus efficace.
Des bords multiples peuvent être sélectionnés sur une seule face et joints par la suite. Ceci génère une mesure qui ne quitte pas la surface d'où une réduction du temps nécessaire aux mouvements entre mesures.
Créer un correcteur de bord évitant des entités sur un plan
Une fois qu'un plan a été sélectionné, cette option détecte automatiquement la géométrie et l'évite dans le modèle CAO que la mesure doit éviter, par mise à jour de la trajectoire au fur et à mesure que les valeurs de correction sont ajustées.
L'utilisateur peut sélectionner un seul bord sur chaque mesure de courbe.
Choix supplémentaires pour l'option de RSP3 Curve
Segments fixes d'angle de tête
Le palpeur RSP3 mesure à des angles de tête fixes, le palpeur pouvant quitter la surface pendant certains balayages de courbes afin de permettre un changement d'angle de tête.
L'élément RSP3 Curve du module MODUS Curve permet de définir des segments de mesure où le palpeur ne quittera pas la surface. L'utilisateur peut ainsi satisfaire les critères de zones haute précision sur une trajectoire de courbe unique.
Rapide et facile à utiliser
Une fois la courbe sélectionnée, la modification de paramètres tels que la direction de balayage peut être facilement effectuée dans les réglages.
Pour les deux méthodes de définition de courbes, l'application intègre le mouvement de MMT contraint, ce qui réduit le mouvement de l'axe de la MMT lors de la mesure de courbes sur un plan.
La combinaison des axes contraints avec une planification de mouvements sans collision entraîne une réduction significative des temps de programmation pour des mesures de courbes rapides et efficaces.
D'autres applications modulaires sont disponibles séparément pour MODUS Planning Suite :

Contraindre le mouvement d’axe de la machine à un seul plan améliore la précision et la répétabilité.
Pourquoi contraindre le mouvement de la MMT ?
Contraindre un ou plusieurs axes de la MMT maximise l'emploi des mouvements de la tête REVO® et minimise le mouvement de la MMT. En contraignant deux axes et en se déplaçant uniquement dans l'axe en parallèle au plan mesuré, la courbure de la machine se trouve dans le plan qui est inspecté faisant qu'aucune erreur n'est détectée. Ceci permet de mesurer des pièces plus rapidement ou d'obtenir un niveau supérieur de précision à partir d'une machine existante.
Par exemple, en mesurant la planéité de la face d'étanchéité d'un bloc-cylindre, la contrainte de deux axes permet d'exploiter la machine plus rapidement sans introduire d'erreurs de mesure. Dans l'idéal, l'axe Z de la machine est utilisé pour faire monter et descendre le REVO puisque sa masse en mouvement est la plus faible et que X et Y sont contraints. Dans ce cas, il n'y a pas de forces de courbure, seulement une compression/tension sur la longueur du coulisseau, cet endroit étant très rigide. Si Z n'est pas possible, alors X (contraint en Z et Y) est la meilleure option suivante puisqu'il a la masse en mouvement la plus faible suivante. L'emploi de Y tirera encore parti de cette méthode par rapport à l'avancée vers la pièce et au retrait de celle-ci de même que lors de scans conventionnels sur 5 axes.
Informations supplémentaires
Aide et formation
Le programme d'installation comporte des tutoriels vidéo et des échantillons de modèles CAO pour la formation.
Compatibilité logicielle
Le code DMIS de MODUS Planning Suite doit être exécuté dans MODUS. Pour disposer de toutes les fonctionnalités MODUS 1.9 est exigé.
Les modèles CAO doivent être au format .Sab
Compatibilité matérielle
La combinaison matérielle prise en charge pour cette version de MODUS Planning Suite est le REVO-2 avec le palpeur de scanning RSP2.