Cos'è un encoder
Gli encoder di posizione vengono utilizzati in moltissimi settori industriali e utilizzano una terminologie e una serie di concetti tecnici molto specifici.
In questo articolo viene fornita una descrizione chiara e semplice degli encoder di posizione. Viene spiegato che cos'è un encoder, quali sono i diversi tipi di encoder, come funzionano e in quali situazioni vanno usati.
Cos'è un encoder
Un encoder è un dispositivo elettromeccanico che converte le informazioni da un formato o codice in un altro. Gli encoder di posizione realizzati da Renishaw convertono il movimento lineare o rotatorio in un segnale elettrico che fornisce informazioni sulla posizione, la velocità e la direzione dello spostamento.
Gli encoder di posizione possono impiegare diverse tecnologie di rilevamento: Renishaw è specializzata nella produzione di encoder ottici, induttivi e laser. RLS è un'azienda associata di Renishaw, specializzata in encoder magnetici.
Cos'è un encoder ottico e come funziona?
Gli encoder ottici sono dispositivi che sfruttano una fonte luminosa e un fotodetettore che si sposta lungo una riga millimetrata per produrre un segnale elettrico. Il segnale viene quindi letto da uno strumento di controllo posto all'interno di un sistema di controllo del movimento. Renishaw vanta oltre trent'anni di esperienza nella progettazione, produzione e assistenza di encoder ottici ad alte prestazioni.
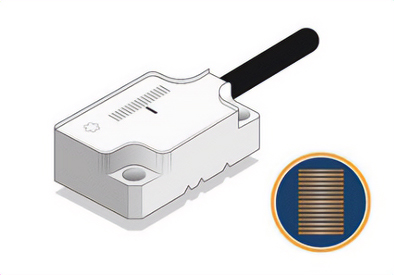
Un encoder ottico si compone di due parti: riga e lettore.
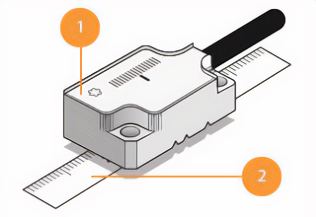
1: Lettore 2 : Riga
Riga per encoder
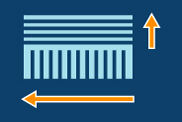
Le righe per encoder ottici sono marcate da linee scure e parallele, molto simili a quelle di un normale righello. Le linee, dette anche graduazioni, vengono "lette" da un sistema ottico presente all'interno del lettore per creare segnali elettrici o immagini da analizzare in modo più dettagliato. Le linee vengono posizionate con estrema cura sul materiale della riga per consentire al sistema di misurare in modo appropriato.
Le righe per encoder possono avere diverse forme: lineari e flessibili, lineari e rigide, dischi e anelli. Tale varietà permette di misurare e controllare tipi di movimento differenti, come ad esempio lineare, rotazione ad arco parziale, rotazione completa oppure un movimento con vari gradi di libertà.
Le righe per encoder ottici devono essere stabili e robuste e, solitamente sono costruite in acciaio inox o vetro.
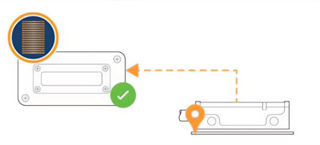
Lettore per encoder
Il lettore contiene un sistema ottico e un'elettronica che genera un segnale di uscita elettrica per descrivere la posizione e la direzione del movimento del lettore rispetto alla riga.
Gli encoder ottici sfruttano l'elaborazione del segnale e l'interpolazione digitale per misurare spostamenti fino a un miliardesimo di metro (1 nm).
Un nanometro corrisponde al diametro dell'elica del DNA, ha a larghezza di due molecole di glucosio o la lunghezza d'onda di un raggio X.
Tipi di encoder ottici

Encoder aperti
Negli encoder ottici aperti, riga e lettore sono separati da un piccolo spazio, denominato "altezza" o "spazio di lettura" e configurati in modo da misurare movimenti lineari, ad arco parziale o rotativi. Il design senza contatto azzera l'attrito ed elimina ogni problema di usura meccanica e isteresi.
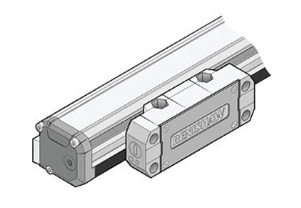
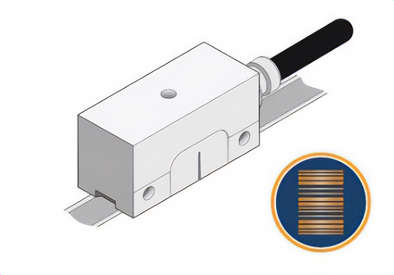
Encoder incapsulati
Negli encoder incapsulati, riga e lettore sono montati in un involucro sigillato che li protegge da possibili contaminazioni, da detriti solidi e liquidi presenti negli ambienti più impegnativi. Di solito, gli encoder incapsulati vengono impiegati su macchine utensili per applicazioni in cui è importante garantire un'accuratezza elevata e una buona resistenza alle contaminazioni dai detriti prodotti dalla lavorazione e dai refrigeranti.
del braccio
Gli encoder ottici misurano il movimento in vari modi, in base al tipo e alla struttura della macchina.
Lineare
Gli encoder lineari rilevano la posizione lungo una retta e vengono utilizzati sugli assi X, Y o Z e risultano ideali per CMM cartesiane.

Rotativo
Gli encoder rotativi rilevano la posizione angolare di un pezzo in rotazione, avvalendosi di una riga a forma di anello o disco. Tali encoder possono controllare il movimento rotativo (ad esempio, in una tavola rotante o nei giunti di un robot).

Arco parziale
Alcuni encoder lineari dispongono di righe flessibili che possono essere avvolte intorno a un tamburo, albero o altra superficie curva di una macchina per controllare movimenti rotativi inferiori al giro completo.
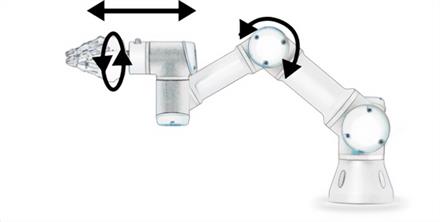
Multi-DoF (più gradi di libertà)
Gli encoder Multi-DoF misurano fino a sei gradi di libertà per rilevare e compensare in modo dinamico una serie di errori (ad esempio, rettilineità e imbardata) in applicazioni ad alte prestazioni.
Differenze fra gli encoder assoluti e incrementali
Gli encoder incrementali possono rilevare il movimento solo in relazione alla loro posizione corrente oppure rispetto a un elemento di riferimento noto. Il segnale di posizione prodotto incrementa o riduce (in base alla direzione) la posizione di un conteggio per volta, man mano che il lettore si sposta in relazione alla riga.
Gli encoder assoluti decodificano immediatamente la loro posizione corrente senza necessità di alcun movimento.
Una delle differenze fondamentali fra i due tipi di encoder è il loro modo di rispondere a eventuali interruzioni dell'alimentazione. Se un encoder assoluto si spegne accidentalmente, alla riaccensione il lettore sarà comunque in grado di indicare la propria posizione corrente, anche se nel frattempo è stato spostato. Al contrario, in caso di spegnimento, gli encoder incrementali perdono le informazioni sulla posizione e dovranno nuovamente acquisire la posizione di riferimento quando vengono riaccesi.
Un'altra differenza importante riguarda le comunicazioni: gli encoder assoluti utilizzano comunicazioni seriali bidirezionali fra il controllo e il lettore, mentre gli encoder incrementali forniscono comunicazioni tramite segnali analogici o digitali che vanno dal lettore al controllo.
Posizione incrementale
Le linee di una riga incrementale sono disposte in modo parallelo ed equidistante,con uno schema molto semplice, simile a quello di un righello senza numeri. Durante la procedura di avvio, la posizione di riferimento viene rilevata leggendo una tacca di zero incorporata nella riga incrementale. Il riferimento è un singolo punto fisso posto ovunque lungo l'asse di misura che viene utilizzato come punto di riferimento della macchina e che a volte viene definito "posizione iniziale". Tutte le informazioni sulla posizione sono in relazione al riferimento.
In genere, un encoder incrementale fornisce informazioni sulla posizione utilizzando due forme d'onda analogiche sfasate di 90 gradi (tipo seno e coseno) oppure due segnali digitali distanti 90 gradi (definiti quadratura). I segnali vengono interpretati dal controllo che calcola l'ampiezza e la direzione del movimento lungo la riga dell'encoder.
La riga di un encoder incrementale può essere fornita con lunghezze adatte a installazioni di grandi dimensioni oppure in bobine da tagliare su misura, in base alla lunghezza dell'asse.
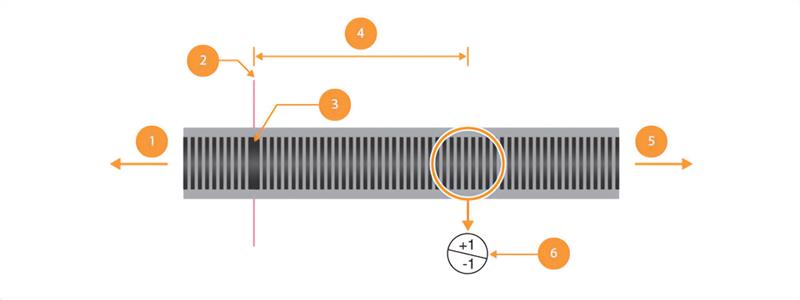
1: direzione del conteggio decrescente, 2: posizione di riferimento, 3: tacca di zero, 4: posizione del controllo = numero di conteggi dal riferimento, 5: direzione del conteggio crescente, 6: variazione del conteggio incrementale
1: direzione del conteggio decrescente, 2: posizione di riferimento, 3: tacca di zero, 4: posizione del controllo = numero di conteggi dal riferimento, 5: direzione del conteggio crescente, 6: variazione del conteggio incrementale
Posizione assoluta
Gli encoder assoluti codificano le informazioni sulla posizione specifica all'interno di tutte le sezioni della riga, come avviene in un righello numerato. Le posizioni specifiche vengono definite da una serie di linee parallele (alcune linee risultano mancanti, in modo simile a un codice a barre). Questo schema univoco consente al lettore di trovare immediatamente la posizione, non appena il sistema viene acceso.
Periodicamente, il controllo richiede al lettore di fornire informazioni sulla posizione, quindi acquisisce un'istantanea della riga e decodifica l'immagine in una posizione specifica, che viene poi restituita al controllo tramite un protocollo per comunicazioni seriali.
Sono disponibili diversi protocolli standard, spesso associati a controlli di macchine di marche specifiche.

Le righe degli encoder assoluti identificano la posizione tramite schemi brevi e univoci di linee e spazi. Il numero di combinazioni di tali schemi (detti anche "parole") non è infinito, pertanto le righe hanno un limite massimo di misura della lunghezza. Nel caso degli encoder assoluti RESOLUTE™ di Renishaw, il limite è di 21 metri.
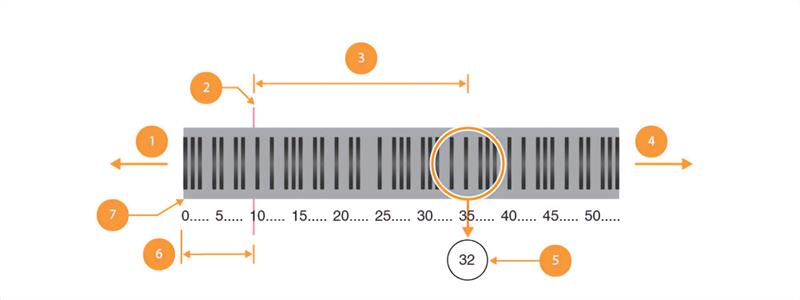
1: direzione della posizione decrescente, 2: posizione di riferimento, 3: posizione del controllo = posizione del lettore - correzione numerica, 4: direzione della posizione crescente, 5: posizione assoluta, 6 correzione numerica della posizione di riferimento, 7: posizione "zero"
1: direzione della posizione decrescente, 2: posizione di riferimento, 3: posizione del controllo = posizione del lettore - correzione numerica, 4: direzione della posizione crescente, 5: posizione assoluta, 6 correzione numerica della posizione di riferimento, 7: posizione "zero"
In quali situazioni conviene usare un encoder incrementale?
Gli encoder incrementali vengono impiegati in moltissime applicazioni di controllo del movimento, come ad esempio automazione industriale, macchine CMM e attrezzature per la lavorazione di semiconduttori. Gli encoder incrementali risultano molto veloci e misurano la posizione con grande accuratezza e con risoluzioni fini.
In quali situazioni conviene usare un encoder assoluto?
Gli encoder assoluti sono particolarmente indicati per macchine che devono conservare le informazioni sulla posizione durante vari cicli di accensione/spegnimento. Vengono spesso utilizzati nei robot chirurgici e in altre applicazioni in cui non si desidera che la macchina torni ciclicamente al punto di riferimento iniziale.
In quali situazioni conviene usare un encoder ottico?
Gli encoder ottici sono dispositivi molto versatili e vengono utilizzati in una vastissima serie di applicazioni per la misura e il controllo degli spostamenti lineari o rotativi.
Il loro impiego è diffusissimo in molti settori industriali, come ad esempio metrologia, lavorazione di semiconduttori, robotica, automazione, macchine utensili e ricerche scientifiche.
Cos'è un encoder induttivo?
Gli encoder induttivi sono sensori di posizione che sfruttano l'induzione elettromagnetica per misurare la posizione o gli spostamenti di un asse.
Sono robusti, resistenti alle contaminazioni, immuni ai campi magnetici esterni e assicurano una buona accuratezza.
Le possibili applicazioni includono gimbal, dispositivi medicali, sistemi di automazione, droni, robot e servomotori.
Per maggiori informazioni, visita la pagina Web dedicata agli encoder induttivi Renishaw.
Cos'è un encoder magnetico?
Gli encoder magnetici utilizzano una riga magnetizzata, dotata di una serie di poli magnetici alternati. Il movimento lungo la riga viene determinato da un lettore che contiene un sensore che rileva le variazioni nel campo magnetico man mano che il lettore si sposta e le converte in segnali elettrici.
Gli encoder magnetici vengono impiegati spesso in robotica (ad esempio per gli UAV) e in applicazioni di stampa.
Per maggiori informazioni sugli encoder magnetici, visita il sito Web di RLS.

Cos'è un encoder laser?
Gli encoder laser sfruttano la lunghezza d'onda della luce laser come unità di misura e rilevano la differenza di lunghezza fra un percorso di riferimento (fisso) e quello misurato (variabile). Gli encoder laser misurano la posizione con estrema accuratezza e con risoluzioni fini.
Vengono utilizzati spesso nei settori aerospace e navale e per varie applicazioni specialistiche.
Per maggiori informazioni, visita le pagine Web dedicate agli encoder laser Renishaw.

Guarda il nostro webinar on-demand
Questo webinar introduttivo descrive in modo semplice e chiaro il funzionamento e le applicazioni degli encoder.
Analizza il ruolo della riga e del lettore, illustra i vari tipi di encoder in commercio e spiega come funzionano e come vengono utilizzati.
Registrati per guardarlo on-demand.
Contatta subito il nostro ufficio vendite
Per ottenere maggiori informazioni, contatta il nostro ufficio di zona e parla con un esperto.