Renishaw 엔코더의 BiSS® 직렬 인터페이스 지원
BiSS C 인터페이스란?
BiSS C-모드(단방향)는 쾌속 동기식 직렬 인터페이스로, 엔코더로부터 위치 데이터를 획득하는 데 사용되는
마스터-슬레이브 인터페이스입니다. 마스터는 위치 수집 타이밍과 데이터 전송 속도를 제어하며 엔코더는 슬레이브입니다. 인터페이스는 다음 2쌍의 단방향 차등 회선으로 구성됩니다.
- “MA”는 마스터에서 엔코더로 위치 획득 요청과 타이밍 정보(클럭)를 전송합니다.
- “SLO”는 엔코더에서 마스터로 위치 데이터를 전송합니다(MA에 동기화).
다음 다이어그램은 전송된 데이터를 보여줍니다.
데이터 형식

BiSS Safety 인터페이스란?
BiSS Safety는 쾌속 동기식 직렬 인터페이스로, 기능 안전성을 요구하는 분야에서 엔코더로부터 위치 데이터를 획득하는 데 사용됩니다. RESOLUTE™ 기능 안전(FS) 엔코더와 FORTiS™ 기능 안전(FS) 엔코더는 BiSS Safety 통신을 사용하며, 다음 기능 안전 표준에 따라 인증되었습니다.
- ISO 13849 Category 3 PLd
- IEC 61508 SIL2
- IEC 61800-5-2 SIL2
BiSS Safety는 마스터-슬레이브 인터페이스입니다. 마스터는 위치 정보 수집 타이밍과 데이터 전송 속도를 제어하고, 엔코더는 슬레이브입니다. 인터페이스는 다음 2쌍의 단방향 차등 회선으로 구성됩니다.
- “MA”는 마스터에서 엔코더로 위치 획득 요청과 타이밍 정보(클럭)를 전송합니다.
- “SLO”는 엔코더에서 마스터로 위치 데이터를 전송합니다(MA에 동기화).
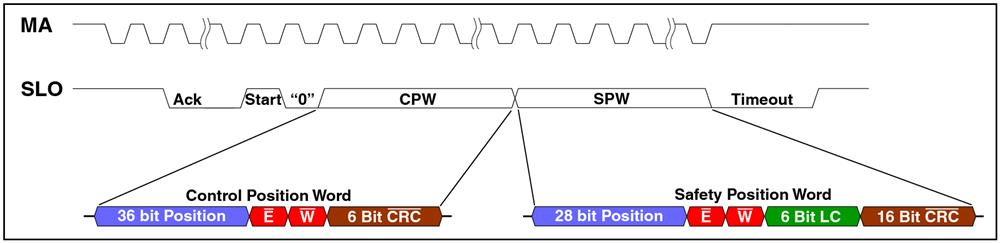
다음 다이어그램은 전송되는 데이터를 보여줍니다.
마스터-슬레이브 신호 통신 형식은 RS485/RS422 차동 라인 구동식입니다.
데이터 형식
일반적인 요청 사이클은 다음과 같이 진행됩니다.
유휴 상태일 때 마스터는 MA를 높음 상태로 유지합니다. 엔코더는 SLO를 높음으로 유지하여 준비 상태임을 표시합니다.
- 마스터는 MA 에서 클럭 펄스의 전송을 시작하여 위치 획득을 요청합니다.
- 엔코더는 MA 의 2 차 상승 에지에서 SLO를 낮음으로 설정하여 응답합니다.
- "Ack" 주기가 완료된 후 이전 그림과 같이 엔코더가 마스터로 데이터를 전송합니다(클럭과 동기화).
- 모든 데이터가 전송될 때 마스터는 클럭을 중지하고 MA를 높음으로 설정합니다.
- 엔코더가 다음 요청 사이클이 준비되지 않으면 SLO를 낮음(시간 초과 기간)으로 설정합니다.
- 엔코더가 다음 요청 사이클을 시작할 준비가 되면 SLO를 높음으로 설정하여 마스터에 알립니다.
Renishaw 엔코더 호환성
- 로터리 엔코더는 단일 순환입니다 (회전 당 2회 카운트, 회전 카운팅 없음) .
- 리니어 엔코더는 제품 데이터 시트에 명시된 대로 다양한 분해능(및 최대 측정 길이) 사양으로 제공됩니다.
BiSS 호환 컨트롤러
BiSS 인터페이스는 ABB, KEB, Galil, ACS, Beckhoff, Elmo 및 Kollmorgen과 같은 다양한 컨트롤러 제조업체에서 지원합니다. BiSS 호환 제품에 대한 자세한 정보는 BiSS 인터페이스 웹사이트에서 확인할 수 있습니다.

다운로드: 데이터시트 및 기술 문서
데이터시트 및 설치 안내서와 같은 앱솔루트 엔코더 시리즈의 기술 사양에 대한 추가 정보는 기술 다운로드 섹션에서 확인할 수 있습니다.
지금 Renishaw 영업팀에 문의하세요
자세한 내용을 알아보고 전문가와 상담하려면 가까운 Renishaw 지사로 문의하시기 바랍니다.