마그네틱 엔코더가 이륜 셀프 밸런싱 로봇 차량을 안정적으로 제어할 수 있도록 지원합니다
배경
도쿄 전기 대학교는 1907년 세이이치 히로타와 신카치 오기모토라는 두 젊은 공학자가 설립하였으며 기술과 과학 교육을 전문적으로 다루고 있습니다. 두 설립자는 공학도를 배출하는 것으로 국가 경제 개발에 기여하고자 했습니다
그 중에서도 로보틱스 메카트로닉스 학과의 준 이시카와 연구원은 로봇 제어 시스템 개발을 포함하여 여러 기술 분야에서 선구자 역할을 하고 있습니다 이시키와 연구원은 공학과 학생들에게 이륜 셀프 밸런싱 로봇 연구을 맡겼습니다. 이 연구에 사용된 것이 바로 Renishaw 계열사, RLS 제품인 RM08 로터리 마그네틱 위치 피드백 엔코더였습니다.
 RM08은 초소형 고속 로터리 마그네틱 엔코더입니다
RM08은 초소형 고속 로터리 마그네틱 엔코더입니다
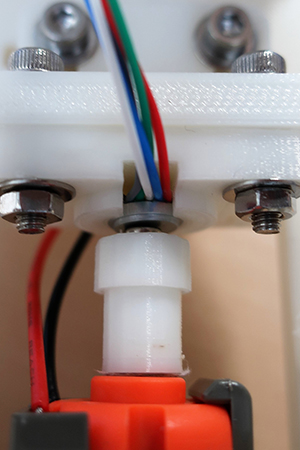
모터 샤프트에 연결된 엔코더
과제
이시카와 연구원은 학생들에게 고질적인 문제인 역립 진자 해결 방안을 연구하도록 지시했습니다. 그래서 잘 알려진 개인 이동 수단, 세그웨이(Segway) 설계 방식처럼 역립 진자가 실제보다 높은 곳에서 무게 중심을 잡는 것으로 해결했습니다.
위치가 바뀌면 다시 안정적인 균형 상태로 돌아가는 서스펜디드 진자와 달리 역립 진자는 본질적으로 불안정합니다. 당구봉이나 빗자루를 손바닥 위에 세운다고 생각해보십시오. 손의 위치를 계속 조정하지 않으면 떨어뜨리기 일쑤입니다.
이처럼 역립 진자는 길이가 짧을수록 긴 것보다 빨리 수직 위치에서 벗어나기 쉽습니다. 그래서 보다 자주 위치 조정이 필요하고 조종이 더 까다롭기도 합니다. 마치 손바닥 위에서 당구봉보다 펜의 중심을 잡기가 어려운 것과 마찬가지입니다.
그래서 세그웨이에 구현된 방식, 즉 휠이 달린 받침대에 중심점을 만드는 것으로 문제를 해결했습니다. 세그웨이 같은 이동 수단은 IMU(관성 측정 장치: inertial measurement unit)에서 얻은 관성 값을 적용하여 가속도계와 자이로스코프라는 두 가지 센서의 균형을 맞춥니다.
이렇게 하면 수직축과 수평축의 가속도계를 모두 사용해서 중력에도 쓰러지지 않도록 각가속도를 조정할 수 있습니다 그리고 진자의 경사각과 각속도를 계속 관찰하면서 비례 미분 제어 시스템이 균형을 유지하며 휠이 앞뒤로 구동하게 됩니다.
이와 같이 이시카와 연구원의 학생들은 설계 시 경사각 감지, 제어 로직, 모터 구동 회로 등 세 부분으로 구성된 솔루션이 효과적으로 통합되도록 설계했습니다. 또한 이 제어 분야에 사용할 PCB는 핸들바 내부에 장착하는데 작은크기와 낮은 중량이 되도록 설계하는 것이 무엇보다도 중요했습니다. 제품이 가장 작은 포장 박스에 들어갈 만큼 작지만 필요한 기능을 모두 갖추고 있도록 PCB 구조가 최적화되었습니다
해결책
PCB 제어반은 핸들바내부, 진자 맨 위에 놓이며 솔리드 스테이트 자이로스코프와 마이크로 컨트롤러, DC 모터 드라이브와 전력 관리 구성품 등 필요한 모든 전자 회로를 포함합니다.
휠이 달린 하단부에는 휠을 연결하는 수평축과 소형 DC 모터가 구동하는 수직축 등 두 종류의 축이 있습니다. 모터는 축 사이 교차 지점에 있는 간단한 베벨 기어 조정으로 양 방향으로 휠을 구동할 수 있습니다.
차량을 효과적으로 제어하려면 시스템이 수직에 가까운 작은 각도 범위 이내로 방향을 유지해야 합니다. 차량이 어떤 방향으로든 30도 이상 기울어지면 안정성을 잃게 됩니다. 균형을 유지하기 위해서는 휠이 속도와 가속도를 계산하면서 지속적으로 구동되어야 합니다.
모션 제어 성능 수준을 달성하기 위해 학생들에게는 모터 출력을 모니터링하고 조절할 수 있는 고분해능 위치 엔코더가 필요했습니다. 또한 차량의 얇은 수직 구조 내에 들어갈 수 있을 만큼 작고 가벼워야 했습니다.
고심 끝에 Renishaw 계열사인 RLS의 RM08 로터리 마그네틱 엔코더가 해결책이라는 결론을 내렸습니다. 이 마찰이 없는 비접촉식 로터리 마그네틱 엔코더는 케이블을 포함한 무게가 고작 2 g에 불과하며 두께 3 mm, 지름 8 mm인 알루미늄 센서 하우징이 장착되어 있습니다
학생들은 얇은 나일론 칼라를 만들어 RM08 엔코더의 마그네틱 액츄에이터와 모터 샤프트 간 기계적 연결 장치로 사용했습니다. 조립했을 때 무게는 0.5 g이 채 되지 않았습니다. RM08 엔코더는 12비트 분해능 출력(회전 당 4,096)을 생성하며 최대 30,000 rpm까지 고속 작동이 가능하며 정확도는 ±0.3°입니다.
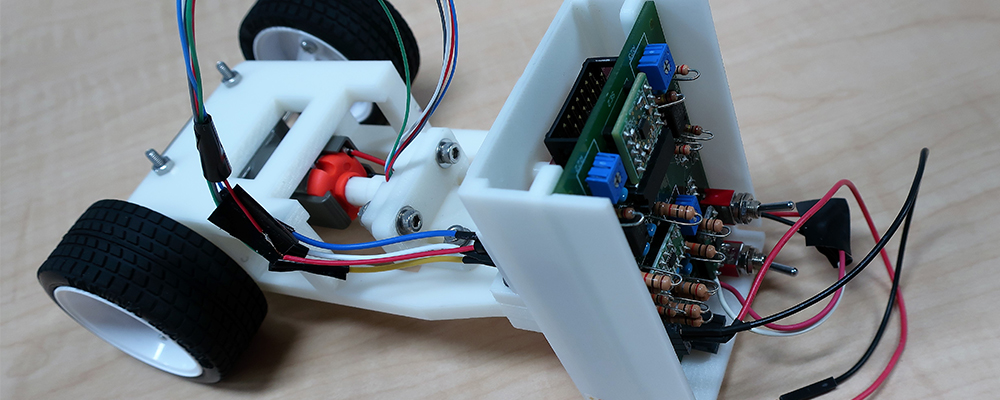
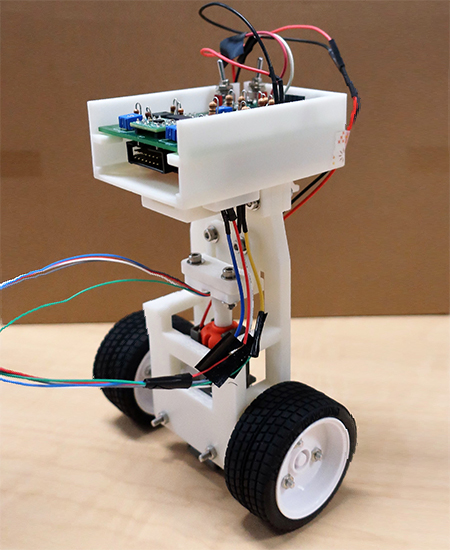
도쿄 전기 대학교 공학부 학생들이 설계한 이륜 셀프 밸런싱 로봇 차량
결과
도쿄 전기 대학교 학생들은 RM08 고속 로터리 마그네틱 엔코더로 12비트 분해능에서 각회전을 측정하는 방식으로, 자체적으로 균형을 유지해 똑바로 서 있을 수 있는 이륜 로봇 차량의 모션 제어 방식을 설계할 수 있었습니다.
RM08 엔코더는 IP68 등급에 안정성도 높고 다량의 OEM 제품에 다양하게 사용될 수 있도록 설계된 제품입니다.
또한 로터리 마그네틱 엔코더는 차량의 까다로운 외관 설계 문제도 해결했다는 점이 중요합니다. 초소형 초경량이기에 공간과 차량 적재 무게의 한계도 극복할 수 있었습니다.
이 프로젝트의 성공으로 학생들은 고차원의 다른 로봇 프로젝트도 도전할 수 있는 자신감이 생겼습니다.

