Software de seguimiento y calibración del estado del robot
Descargue el paquete integrado de software RCS
El paquete integrado de software RCS es fácil de seguir, con guías visuales que le guían paso a paso a través de una serie de rutinas de configuración y verificación de robots.
Procesos guiados para la configuración y el diagnóstico de robots
El paquete integrado de software RCS se incluye con las soluciones de mantenimiento y calibración de robots industriales. Puede realizar un seguimiento de los datos cruciales de calibración y estado del robot con los sistemas de ballbar RCS L-90 y RCS T-90. Obtiene el historial de datos trazables que pueden respaldar los programas de mantenimiento y reducir el tiempo de inactividad total del robot.
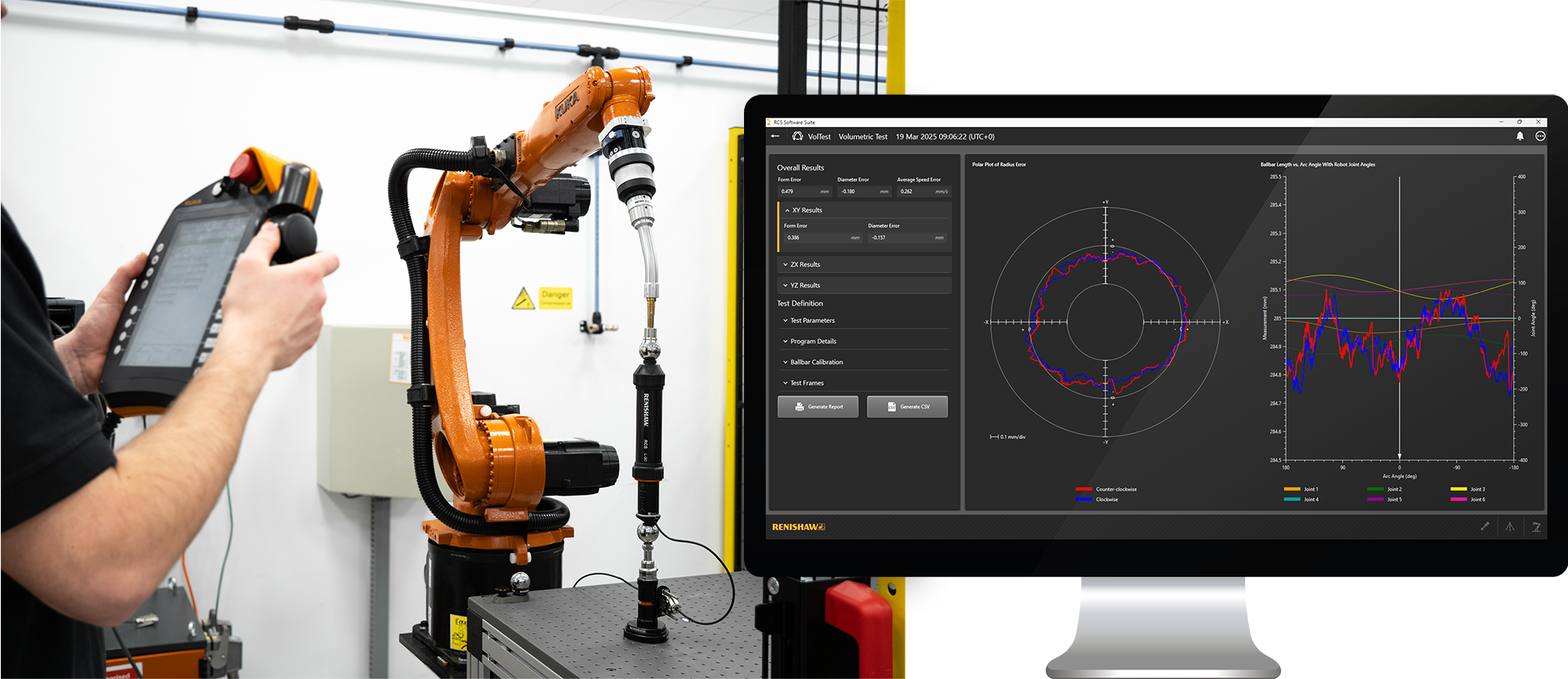
El paquete de software, que se puede ejecutar en línea o fuera de línea, permite realizar una variedad de rutinas utilizando ambos sistemas de ballbar. Cada sesión incluye instrucciones paso a paso para ayudarle a configurar el robot industrial y evaluar su rendimiento. El software almacena los resultados como referencia, con capacidad para generar informes PDF o archivos CSV.
El paquete integrado de software RCS es compatible con la mayoría de marcas de robots industriales, como ABB, Fanuc, KUKA y Yaskawa.
Automatización industrial avanzada con el paquete integrado de software RCS
Con prestaciones en línea y fuera de línea, puede ejecutar sesiones para la configuración y verificación de la estructura de herramienta del robot y del marco de la pieza, compensación de articulaciones, repetibilidad y holgura:Configuración del robot
Prepare el robot para iniciar la producción con una serie de sesiones de configuración.
- Estructura de herramienta: Utilice el ballbar RCS L-90 para localizar puntos centrales de la herramienta con precisión (TCP) con montaje en el extremo del brazo.
- Estructura de herramienta y compensación de articulaciones: Capture datos con el RCS T-90 para crear programas robóticos para localizar estructuras de herramientas y compensación de articulaciones. De este modo, puede remasterizar el robot en la instalación.
- Estructura de pieza: Utilice puntos de referencia del kit de estructura de pieza RCS para localizar fácilmente estructuras de pieza con RCS L-90.
- Alineación de inspección: Cree plantillas de programas robóticos para definir estructuras de herramienta y pieza con la RCS serie P.
Controle el rendimiento del robot
Detecte problemas de rendimiento del robot mediante una serie de ensayos de diagnóstico.
- Verificación de estructura de herramienta: Determine la estabilidad del TCP mientras gira alrededor de una pieza.
- Repetibilidad de articulación individual y global: Ponga a prueba la repetibilidad de movimientos del robot, de una articulación individual o de todas a la vez, a partir de una posición concreta.
- Ensayo volumétrico: Mida la distancia de desviación en una serie de rutas circulares en los planos XY, ZX e YZ.
Supervise las principales métricas de la célula robótica
Rendimiento de trayectoria
Confiar en que el robot va a seguir una ruta predeterminada con precisión es crucial para su eficiencia. Cree un gráfico 3D de rendimiento de la trayectoria y detecte las principales causas del bajo rendimiento.
Repetibilidad
El mantenimiento, la estabilidad de las articulaciones y la calibración pueden afectar la repetibilidad de un robot. La consistencia del robot al realizar la misma acción repetidamente es crucial para la productividad.
Holgura
El desgaste, las cargas pesadas y las colisiones pueden provocar holguras en las articulaciones del robot. Esto provoca fallos en las articulaciones, por lo que son necesarias reparaciones o sustituciones que a menudo requieren un tiempo de inactividad no planificado.
Licencia del paquete integrado de software RCS
Puede descargar e instalar gratuitamente el paquete integrado de software RCS. Para ejecutar sesiones de los sistemas de ballbar RCS en el robot, puede ser necesario adquirir licencias de software para 1, 3 o 5 usuarios.
En esta versión gratuita puede:
- Añadir información sobre una cantidad ilimitada de sistemas de robots reales, incluidos datos de estructura de herramientas y piezas.
- Exportar/importar datos del sistema robótico.
- Definir parámetros de reglaje del robot y sesiones de ensayos de verificación.
- Ver el historial de sesiones y generar informes de resultados en archivos PDF o CSV.
- Crear plantillas de programas de robot para soluciones de inspección de Renishaw en robots industriales (RCS serie P)
Especificaciones del paquete integrado de software RCS
Los vídeos de tutoriales del paquete integrado de software RCS le guían paso a paso en temas como la descarga del software, la configuración del sistema robótico y la conexión del sistema de ballbar RCS.
Requisitos mínimos del PC
Para ejecutar el paquete integrado de software RCS, necesita un PC con los siguientes requisitos mínimos:
- Procesador: 2 GHz para 64 bits
- RAM: 4 GB
- Espacio en el disco duro: 2 GB
- Tarjeta gráfica: DirectX 9 o posterior con controlador WDDM 1.0
- Pantalla: 1024 x 768
- Conectividad: USB2.0
Especificaciones recomendadas del PC
Para obtener el máximo rendimiento del paquete integrado de software RCS, se recomienda la siguiente especificación del PC:
- Procesador: 2,80 GHz
- RAM: 16 GB
- Espacio en el disco duro: 8 GB
- Tarjeta gráfica: DirectX 9 o posterior con controlador WDDM 1.0
- Pantalla: 1920 x 1080
- Conectividad: USB2.0, puerto Ethernet
Consulte a nuestro equipo comercial hoy mismo
Rellene el formulario siguiente para obtener más información y consultar a un experto.