Como funcionam os sistemas interferométricos?
Como funciona a interferometria?
Introdução
A ferramenta mais comum em interferometria, o interferômetro de Michelson, foi inventada por Albert Abraham Michelson em 1887, o primeiro americano a ganhar um Prêmio Nobel de Ciência. Ele construiu um sistema de espelhos refletores e espelhos semitransparentes (divisores de feixe) para combinar feixes de luz separados que provém da mesma fonte. A interferometria laser é um método bem estabelecido para a medição de distâncias com grande exatidão.
Princípios básicos
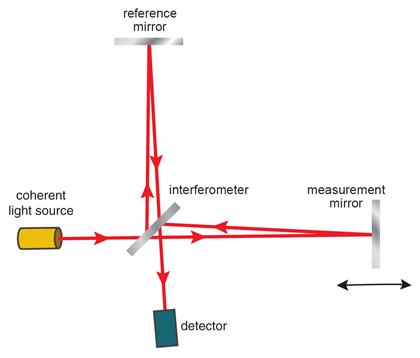
Normalmente, um único feixe de entrada proveniente de uma fonte de luz coerente será dividido em dois feixes idênticos pelo interferômetro de Michelson. Cada um desses feixes percorre uma rota diferente, chamado caminho, sendo em seguida recombinados antes de alcançar um detector. A diferença entre as distâncias percorridas por cada feixe cria uma diferença de fase entre eles. É esta diferença de fase introduzida que cria o padrão de interferência entre as ondas inicialmente idênticas, que é identificada no detector. Se um único feixe foi dividido ao longo de dois caminhos (medição e referência), então a diferença de fase é o diagnóstico de qualquer coisa que altere a fase ao longo destes caminhos. Esta pode ser uma alteração física no comprimento do próprio caminho ou uma alteração no índice de refração do meio que o feixe percorre.
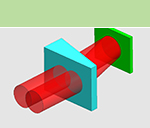
Interferometria de Michelson
O feixe laser (1) é emitido pela fonte laser e é dividido em dois feixes (de referência (2) e de medição(3)) no interferômetro. Estes feixes são refletidos de volta pelos dois retrorefletores e recombinados no interferômetro antes de atingir o detector.
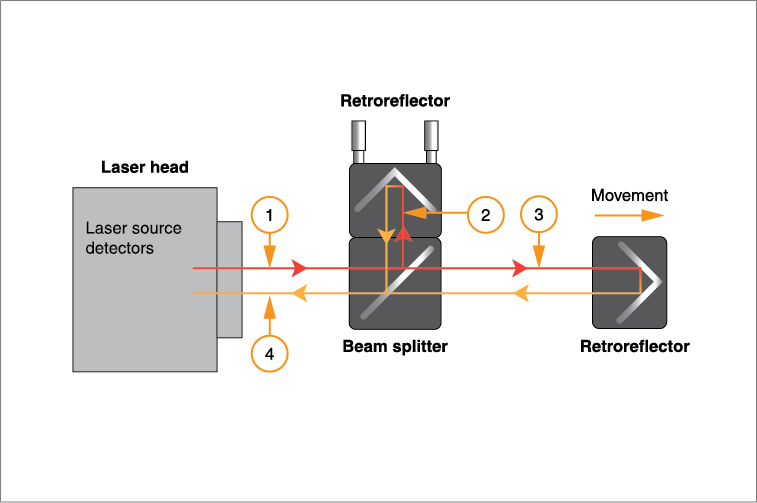
O uso de retrorefletores assegura que os feixes provenientes dos braços de referência e de medição sejam paralelos quando se recombinam um com o outro no interferômetro. Os feixes recombinados atingem o detector quando eles interferem um com o outro de modo construtivo ou destrutivo. Na interferência construtiva, os dois feixes estão em fase e os picos de ambos os feixes se reforçam mutuamente, resultando em uma franja clara, enquanto que na interferência destrutiva, os feixes estão defasados e os picos de um feixe são cancelados pelos vales do outro feixe, resultando em uma franja escura.
Processamento do sinal
O processamento do sinal óptico no detector permite que seja observada a interferência destes dois feixes. O deslocamento do braço de medição causa uma mudança na fase relativa entre os dois feixes. Este ciclo de interferência construtiva e destrutiva faz com que a intensidade da luz recombinada seja submetida a uma variação cíclica. Um ciclo de variação em intensidade de claro para escuro para claro ocorre cada vez que o feixe de medição/retrorefletor (3) é deslocado pela metade do comprimento de onda do laser.
Exatidão do sistema
A exatidão das medições posicionais lineares depende da exatidão com que o comprimento de onda do feixe laser é conhecido. O comprimento de onda operacional do feixe laser depende do índice de refração do ar através do qual ele passa e este se altera com a temperatura, pressão e umidade relativa do ar. Portanto, o comprimento de onda do feixe precisa de ser alterado (compensado) para incorporar quaisquer alterações nestes parâmetros.
Sistemas RLE
O RLE é um sistema único e avançado de laser interferômetro especificamente projetado para aplicações de resposta de posicionamento. Cada sistema RLE consiste de uma unidade laser RLU e um ou dois cabeçotes detectores RLD10. O modelo depende dos requisitos da aplicação específica.
Legenda:
Como funciona o RLE?
| Fonte do laser | Acoplamento de fibra | Óptica do interferômetro | Óptica de medição | Esquema de detecção | Sinais de feedback do leitor |
 |  |  |  |  |  |
Como funciona o RLU?
Saída laser da RLU para o RLD
| Fonte do laser | Eletrônica de estabilização | Acoplamento de fibra | Estabilidade de pontaria do feixe |
|  | |  |
Processando o sinal de volta para o RLD
| Sinais de erro do leitor | Estado do sistema | Interpolação digital | Sinais analógicos do leitor |
|  |  |  |
Como funciona o RLD?
Saída laser do RLD para a óptica de medição
| Óptica do interferômetro | Alinhador de feixe |
Exclusivos esquemas ópticos com SDE minimizado, compatível com óptica de medição com espelho plano ou retrorefletor. |  Um dispositivo óptico utilizado para minimizar o tempo de instalação, que proporciona ajuste angular simplificado do feixe |
Saída laser da óptica de medição para o RLD
| Sinais analógicos do leitor | Esquema de detecção | Óptica de medição |
 Quadratura analógica intrínseca gerada pelo esquema de detecção e enviada diretamente para a RLU | O esquema de detecção de franja incorporado converte as franjas de interferência da medição e referência em sinal eletrônico | Espelhos altamente reflexivos com revestimento dielétrico de óxido duro |
Sistemas HS20

O cabeçote laser HS20 da Renishaw combinado com um kit de óptica linear externo forma um sistema de leitor laser interferométrico sem contato para eixos longos e para aplicações de feedback de posição linear de elevada exatidão.
O cabeçote laser HS20 pode ser incorporado ao ciclo de controle de posição de qualquer sistema de controle de movimento que possa ser configurado para aceitar o formato de quadratura digital ou analógica de sinais do leitor. O cabeçote laser pode ser montado como substituto direto de sistemas de encoders lineares, tanto em aplicações OEM como em atualizações (retrofits).
Como o funciona o HS20?
| Fonte do laser | Eletrônica de estabilização | Óptica de medição | Sinais de | Sinais de feedback de leitor |
 Classe 2 estabilizada (<1 mW) laser HeNe |  Utilizada para controlar a estabilidade da frequência laser através da modulação do conjunto do cabeçote do tubo laser |  Soluções ópticas de longo alcance para comprimentos de eixos de máquina de até 60 m |  Linhas de erro ativo, individuais para cada eixo laser, podem ser facilmente integradas ao sistema de feedback da máquina para operação de ciclo fechado |  Quadratura digital ou analógica de padrão industrial para feedback de posição de elevada exatidão |
Sistemas de compensação
Muitas vezes assume-se que interferômetros laser proporcionam automaticamente o máximo em exatidão de medição. No entanto, em realidade a situação é mais complexa. Ao medir deslocamentos lineares no ar com um laser, o desempenho do sistema de compensação ambiental é particularmente importante. O laser e a óptica de medição interferométrica proporcionam níveis muito elevados de resolução linear e precisão, mas para aplicações "no ar", é a unidade de compensação ambiental a principal responsável pela exatidão de medição dos sistemas.
Os deslocamentos são representados em termos de um comprimento de onda especificado. Portanto, uma medição exata e repetível depende da constância do comprimento de onda. Quando o feixe laser se desloca através do ar, o comprimento de onda varia em função do índice de refração.Por outro lado, a medição a partir do leitor não considera a dilatação da peça ou da estrutura da máquina devida às variações de temperatura.
Para compensar as fontes de erro mencionadas acima e assegurar a mais elevada exatidão em aplicações "no ar", é necessário um sistema de compensação.
Fatores ambientais que afetam a exatidão
Fatores de índice de refração:
 |  |  |
Temperatura do ar | Umidade relativa | Pressão do ar |
Dilatação térmica:
 |
Temperatura do material |
Sistema de compensação RCU10
O sistema de compensação de quadratura em tempo real RCU10 compensa as fontes de erro ambiental em sistemas de movimento linear para melhorar a exatidão e repetibilidade de processo.O RCU10 monitora o ambiente das máquinas através de uma série de sensores e utiliza um avançado processamento de sinal digital para executar a compensação em tempo real dos os sinais de feedback de posição. A unidade fornece os sinais de feedback corrigidos para o comando de movimento nos formatos de analógico ou digital.

Como o funciona o RCU10?
O diagrama mostra o esquema de funcionamento do RCU10.
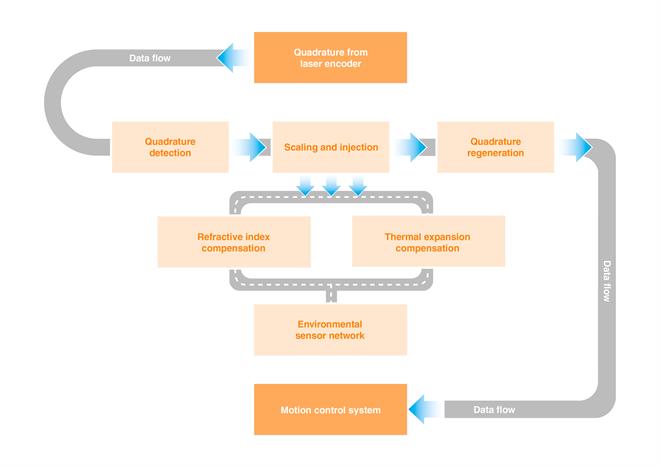
A unidade de compensação RCU10 aceita quadratura digital e, junto com os dados ambientais coletados por uma série de sensores, calcula o valor total da compensação necessário para corrigir a posição do eixo. A compensação necessária é então aplicada através do escalonamento da quadratura e injeção (adição ou remoção de pulsos de quadratura) no sinal de feedback do leitor. A totalidade do processo sendo concluído com um mínimo de latência para o comando de movimento. Os sinais de feedback corrigidos são enviados para o comando de movimento em formatos de leitor digitais ou analógicos.
Explore nossa página "Por que usar um leitor laser" para entender melhor como nossos produtos funcionam e como eles podem aprimorar seus processos.
Entre em contato com nossa equipe de vendas hoje
Entre em contato com o nosso escritório local para obter mais informações e falar com um especialista.