エンコーダシステムの紹介
位置決めエンコーダは、幅広い用途および産業で用いられており、さまざまな技術思想と専門性に特徴を有している。
本記事で、光学式エンコーダの概要を平易に解説し、エンコーダとは何か、どのような種類があるか、仕組みや使用される場面などについて記載する。
エンコーダとは
エンコーダとは、情報をあるフォーマットまたはコードから別のフォーマットまたはコードに変換する電子機器のことを言う。レニショーなどが製作している位置決めエンコーダは、直線運動または回転運動を電気信号に変換し、位置、速度、移動方向に関する情報を提供する。
位置決めエンコーダにはさまざまな検出技術が用いられており、レニショーは光学式、電磁誘導式およびレーザー式のエンコーダを得意としている。また、レニショーの関連会社である RLS は、磁気式エンコーダを専門に扱っている。
光学式エンコーダの概要と仕組み
光学式エンコーダは、スケール上を移動する光源とフォトディテクタとを使用して電気信号を生成する。この信号が、モーション制御システム内の制御装置 (コントローラ) に伝達される。レニショーは、高性能光学式エンコーダの設計、製造、サポートで 30 年以上の経験を培っている。
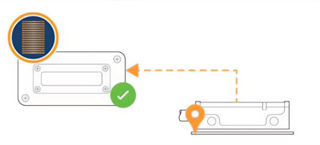
光学式エンコーダを構成する要素は、スケールとリードヘッドに分けられる。
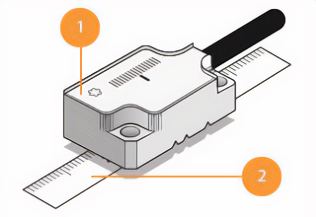
1: リードヘッド 2: スケール
エンコーダスケール
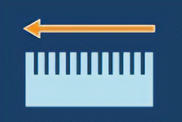
光学式エンコーダスケールには、従来の定規のように、暗い色で無数の平行線が描かれている。この線 (目盛り) がリードヘッド内の光学システムによって「読み取られ」、電気信号または画像が生成されて、処理される。なお、目盛りは、適切なシステム測定性能を確保できるよう、スケール上に正確に刻まれている。
光学式エンコーダスケールには、テープスケール、ガラススケール、ディスク、リングなどさまざまな形態のものがあり、直線、回転、部分円弧、またはこれらの動きの組合せなど、多様な動作の測定と制御を行うことができる。
光学式エンコーダスケールは、安定していて堅牢でなければならないことから、ステンレススチールやガラスで作られることが一般的である。
エンコーダリードヘッド
リードヘッドは、光学機構と、スケールに対するリードヘッドの位置および移動方向を示す電気信号を生成するための電子回路を格納している。
信号処理とデジタル内挿分割により、光学式エンコーダは移動を 10 億分の 1 メートル (1nm) の分解能で表すことができる。
1nm とは、DNA らせんの半径、グルコース分子の 2 個分の幅、X 線の波長に相当する。
光学式エンコーダのタイプ

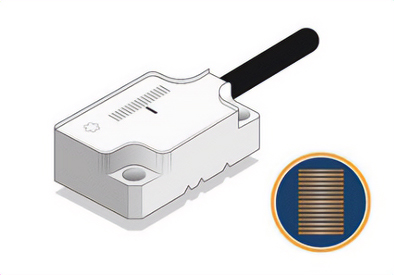
オープンタイプエンコーダ
オープンタイプ光学式エンコーダは、スケールとリードヘッドが分離しており、コンパクトさが特徴のシステムである。レニショーのオープンタイプ光学式エンコーダは非接触設計のため、摩擦ゼロで、機械的な摩耗やヒステリシスが生じないというメリットを有している。
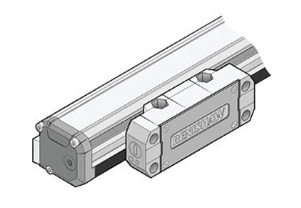
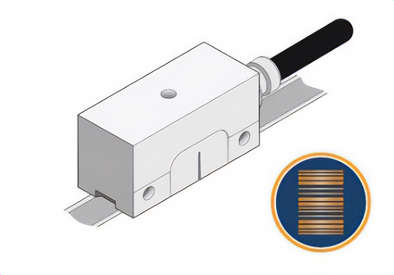
クローズドタイプエンコーダ
クローズドタイプエンコーダは、スケールとリードヘッドが密封した筐体内に格納されており、過酷な環境でも切り粉などが混入しない構造を有したエンコーダである。工作機械など、高精度と、切り粉やクーラントによる汚染に対する耐性が重要とされる場所で一般に使用される。
動作
光学式エンコーダでは、さまざまな形態の動作を測定することができる。
リニア (直線)
リニアエンコーダは、直線に沿って位置を出力するタイプで、直交型三次元測定機などの X、Y、または Z 軸に使用される。

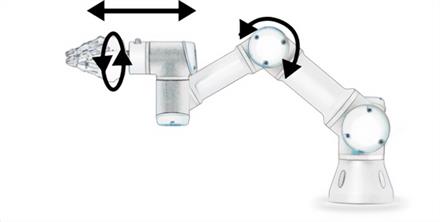
ロータリ (回転)
ロータリエンコーダは、回転体の角度位置を、リング形状やディスク形状のスケールを介して出力する。ロータリテーブルやロボットの関節などの回転動作の制御に使用される。

パーシャルアーク (部分円弧)
一部のリニアエンコーダスケールはドラム、シャフト、機械の湾曲面などに巻き付けることができ、1 回転に満たない回転動作を制御することができる。
アブソリュートエンコーダとインクリメンタルエンコーダの違い
インクリメンタルエンコーダは、現在の位置または既知の基準位置に対する動きを検出し、リードヘッド/スケールの移動に伴い、(方向に応じて) 位置を 1 カウントずつ増減して信号を出力する。
アブソリュートエンコーダは、移動しなくても現在位置を即座に信号として出力できる。
インクリメンタルエンコーダとアブソリュートエンコーダでは、電源喪失時の挙動が大きく異なる。アブソリュートエンコーダは、電源を喪失した場合、電源が復旧したときに電源喪失時の位置から移動していても、現在位置が正しく出力される。インクリメンタルエンコーダは、電源喪失中に位置情報を失うため、電源が復旧したときに基準位置を取得し直す必要がある。
また、通信に関しても大きく異なる。アブソリュートエンコーダが、コントローラとリードヘッド間の双方向シリアル通信を特徴とするのに対し、インクリメンタルエンコーダは、アナログまたはデジタル信号によるリードヘッドからコントローラへの一方向通信を行う。
インクリメンタル位置
インクリメンタルスケール上は、数字のない定規のように、平行線が等間隔でシンプルに並んでいる。動作開始後に、インクリメンタルスケール上のリファレンスマークが読み取られ、基準位置が確立される。この基準位置は、測定軸沿いの任意の箇所にある単一の固定点であり、機械の基準点として使用されることから、「原点」と呼ばれることもある。この基準位置がすべての位置情報の基準である。
インクリメンタルエンコーダは位置情報を、正弦波と余弦波のような 90°位相差の 2 点のアナログ信号 (アナログ波形) や 90°位相差の 2 点のデジタル信号 (矩形波) で出力する。コントローラがこれらの信号を受信し、処理することにより、スケールに沿った移動の大きさと方向を算出する。
インクリメンタルエンコーダスケールは、大規模システム向けに長尺にすることも、任意の軸長に合わせて切断することもできる。
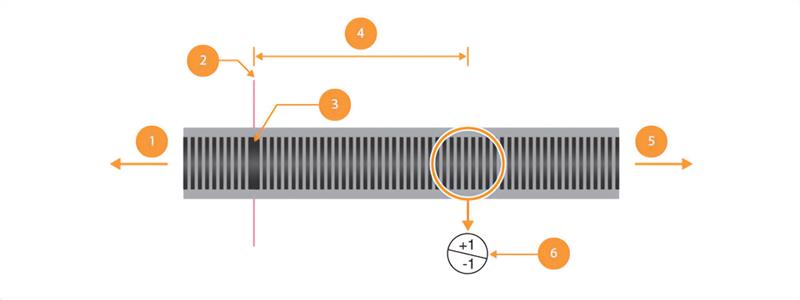
1: カウント減少方向, 2: 基準位置, 3: リファレンスマーク, 4: コントローラが認識する位置 = 基準からのカウント数, 5: カウント増加方向, 6: インクリメンタルカウントの変化
アブソリュート位置
アブソリュートスケール上には、数字の付いた定規のように、具体的な位置情報がスケール全域にわたって符号化されて記されている。この位置情報は、バーコードのように平行線の組合せで定義され、パターンに反復性がないため、リードヘッドは起動すると直ちにその位置を検出することができる。
コントローラからリードヘッドに対して位置情報が定期的にリクエストされ、リクエストを受けたリードヘッドがスケールを読み取り、位置情報をシリアル通信プロトコルを介してコントローラに伝達する。
各種業界標準の通信プロトコルが利用可能で、コントローラメーカーとひも付けられていることも少なくない。

アブソリュートスケールでは、短いユニークコード (またはワード) の線とスペースによって位置が定義される。このワードを配置できる数には限りがあるため、アブソリュートスケールの長さにも限界がある。レニショーの RESOLUTE™ アブソリュートエンコーダでは、最大測定長は 21m である。
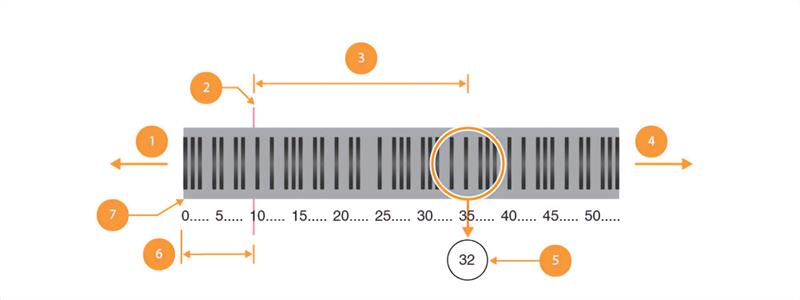
1: 位置減少方向, 2: 基準位置, 3: コントローラが認識する位置 = リードヘッド位置 - 数値オフセット, 4: 位置増大方向, 5: アブソリュート位置, 6: 基準位置の数値オフセット, 7: ゼロ位置
インクリメンタルエンコーダの用途
インクリメンタルエンコーダは、工場の自動化、三次元測定機、半導体製造装置など、さまざまなモーションコントロール用途で使用されている。高分解能かつ高速で正確な位置決め測定が可能なエンコーダである。
アブソリュートエンコーダの用途
アブソリュートエンコーダは、電源を OFF にしても位置情報を保持する必要がある機械に非常に適している。具体的には、固定の基準位置への原点復帰が望ましくない外科手術ロボットや工作機械が挙げられる。
光学式エンコーダの用途
光学式エンコーダは、直線移動または回転移動を測定および制御するための位置測定機器で、
精密測定、半導体製造、ロボット、オートメーション、工作機械、科学研究などの多くの産業や用途で使用されている。
電磁誘導式エンコーダとは
位置決めセンサーの一種で、電磁誘導によって軸の位置や動作を測定する。
堅牢性、汚れへの耐性、外部磁場への耐性、高精度などが特徴で、
ジンバルや医療機器、一般的なオートメーション、無人航空機、ロボット、サーボモータなどで使用される。
詳細については、こちらを参照のこと。
磁気式エンコーダとは
磁気式エンコーダは、交互に磁化された磁極を特徴とする磁気スケールを使用する。リードヘッドには磁界の変化を検出し、その変化を電気信号に変換するセンサが内蔵されており、このリードヘッドによってスケールに沿った動きが検出される。
磁気式エンコーダは、ロボット工学 (AGV など) や印刷の分野で使用されることが多い。
磁気式エンコーダシステムの詳細については、RLS の Web サイトを参照のこと。

レーザーエンコーダとは
レーザーエンコーダは、固定した基準パスと可動する測定パスとの間のパス長差を検出することにより、レーザー光の波長をその測定単位として使用するシステムである。高分解能かつ高精度での位置決め測定が可能である。
航空宇宙産業や半導体産業などの専門的な用途でよく使用される。
詳細については、こちらを参照のこと。

オンデマンドウェビナー
エンコーダシステムの紹介に関するウェビナーでは、エンコーダについて簡単な言葉で説明している。
また、スケールとリードヘッドの役割、エンコーダのタイプ、仕組みやどのような場面で使用するかについても触れている。
ぜひご登録を。