Navigation
Machine I/O (44W HDD socket)
This connector is not required when used in conjunction with a UCC2-2 and is supplied pre-blanked for use with UCC2-2.
Remove blanking plugs for use with all other controllers.
The 44-way (high-density) socket provides connection for the CMM I/O.
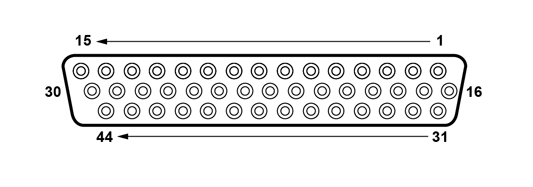
| Pin no. | Function | Description |
|---|---|---|
1 | +24 Vdc | Supply provided for use on CMM switched |
2 | Air | Output to control an air solenoid |
3 | X brake | Output to control the X brake |
4 | Y brake | Output to control the Y brake |
5 | Z brake | Output to control the Z brake |
6 | Output 0 | General purpose output signal |
7 to 12 | Reserved |
|
13 | Input 0 | General purpose input signal |
14 | Input 1 | General purpose input signal |
15 to 19 |
|
|
20 | De-clutch | CMM de-clutch signal |
21 | Reserved |
|
22 | Low air | Low air pressure switch input |
23 | Crash | Crash detector switch input |
24 | Reserved |
|
25 | X axis outer limit | CMM X axis limit switch input |
26 | - X axis outer limit | CMM X axis limit switch input |
27 | Y axis outer limit | CMM Y axis limit switch input |
28 | -Y axis outer limit | CMM Y axis limit switch input |
29 | Z axis outer limit | CMM Z axis limit switch input |
30 | -Z axis outer limit | CMM Z axis limit switch input |
31 | X axis inner limit | CMM X axis limit switch input |
32 | -X axis inner limit | CMM X axis limit switch input |
33 | Y axis inner limit | CMM Y axis limit switch input |
34 | -Y axis inner limit | CMM Y axis limit switch input |
35 | Z axis inner limit | CMM Z axis limit switch input |
36 | -Z axis inner limit | CMM Z axis limit switch input |
37 | 24 V return (0 V) | Common reference line for input and output signals |
38 to 43 | Reserved |
|
44 | 24 V return (0V) | Common reference line for input and output signals |
Shell | Screen |
|
+24 Vdc
+24 Vdc limited to 1 A.
Air
An active low signal to engage an air solenoid.
Brakes
These outputs (pins 3, 4 and 5) are used to disengage the CMM axis brakes if fitted. These outputs become active as soon as the CMM servos are engaged. During the commissioning process it is possible to invert the output from the brake connections from an active low signal to an active high.
General purpose output
It is an open collector pulled down to the 0 V line via an NPN transistor when activated. It is suitable for driving devices in the range 5 V to 24 V with a maximum output current of 200 mA. If the output is not required then it should be left open circuit. The output is protected for excess voltage and over current within the controller.
Switched inputs
Two uncommitted inputs are provided. Each input is activated by being pulled down to the 0 V. The inputs are not opto isolated and are pulled up to 24 V via a 10 kohm resistor. These inputs can accept signal levels in the range of +5 V to +48 V, and need to be pulled below 1 V to signify a change in state.
De-clutch
This input on pin 20 should be pulled down to the 0 V return line, to signal to the controller that the CMM's drives are mechanically connected to the moving elements of the machine (i.e. in their normal condition). The input should be open circuit, or held high, when the CMM has been temporarily "de-clutched" from the drive motors to allow manual positioning. The servo system will not drive the motors in this condition and will resume control at the machine's current position when the signal goes low.
Low air pressure
The low air pressure signal should be connected to a suitable air pressure switch. This input is monitored by the controller and when activated will remove power from the motors by causing a system fatal fault. During the commissioning process it is possible to invert this signal from an active low signal to an active high. If this capability is not required for integration to the system then it should be connected to the 0 V.
Crash
The crash signal is used to inform the SPA3 of a collision of the mechanical structure of the machine. Typically this is a sensor that is fitted to the end of the CMM quill and if activated will remove power from the motors by causing a system fatal fault.
During the commissioning process it is possible to invert this signal from an active low signal to an active high. If this capability is not required for integration to the system then it should be connected to the 0 V.
Limit switches
The SPA3 controller supports both inner and outer limit switches for each of machine axes. During the commissioning process it is possible to invert this signal from an active low signal to an active high. If this capability is not required for integration to the system then it should be connected to the 0 V .
Inner limit switches
If an inner limit is activated the SPA3 system will perform a maximum movement de-acceleration in all axes to a stop and then perform a controlled axis back-off in the opposite direction, as if a trigger event occurred.
Outer limit switches
If an outer limit is activated the SPA3 system will immediately disengage all servo power to the machine drives.
Recovery of this error is only possible by removing the outer limit switch activation (i.e. by moving the machine off of the switch).
0 V (24 V return)
This is the 0 V reference for all of the I/O signals.