Navigation
Operating principle
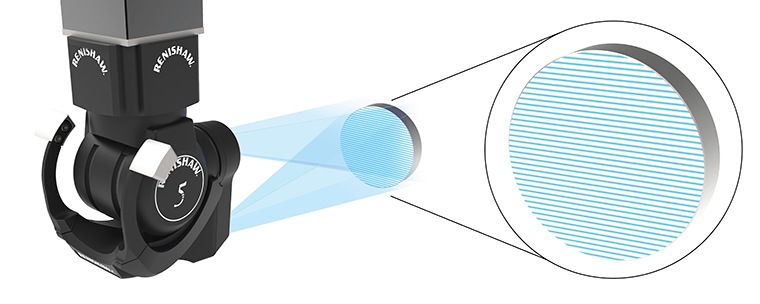
RFP1 projects a sinusoidal fringe pattern onto the surface of the part and the camera takes images of the pattern deformation caused by the surface topology.
On a flat plane the pattern will be uniform:
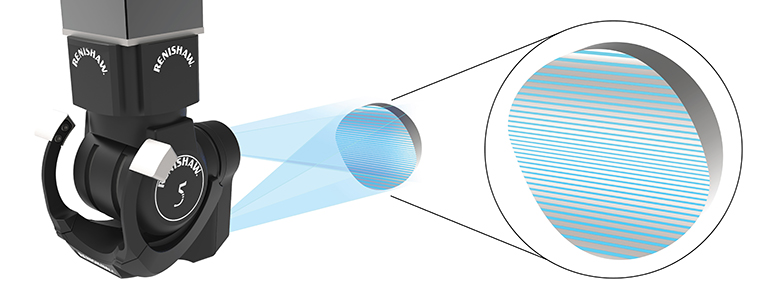
Changes in surface topology cause deformation of the pattern:
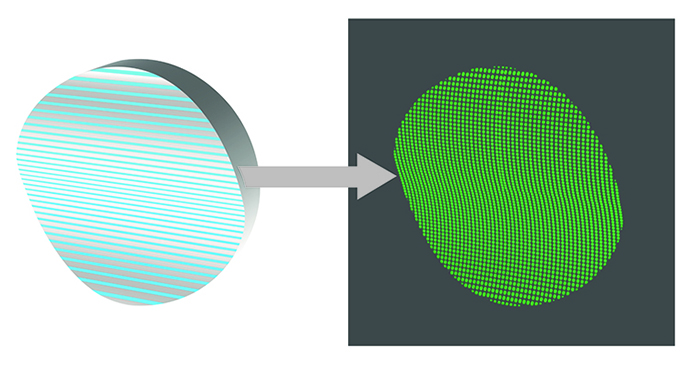
The change in fringe intensity at each point is used to calculate the absolute 3D position of that point on the part surface. A patch of XYZ position data points is returned for each fringe capture with up to 640,000 points in each patch.