RCS robot ballbar test results
Volumetric tests

A volumetric test using the RCS L-90 is performed to verify the robot's 3D path accuracy and spatial performance, ensuring it is moving as expected across the full working envelope. The ballbar enables the robot to trace controlled circular arcs and linear paths so the software can capture shape errors, diameter deviations, and overall spatial accuracy across XY, ZX, and YZ planes. This is typically part of a preventative maintenance routine or a health check to confirm that the robot is still performing to its baseline and has not drifted due to wear, collisions, or environmental changes.
If the volumetric test identifies significant deviations, such as shape errors or diameter errors, this indicates deterioration in the robot's accuracy or repeatability across its working volume. These results help diagnose issues such as joint backlash, joint offsets, or mechanical degradation, providing actionable insight rather than automatic compensation (a common misconception). Depending on the outcome, the recommended interventions may include re-mastering, joint offset recovery, mechanical adjustment, or scheduling a pre-maintenance call out to restore the robot to its known baseline state.
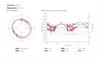
When you run a volumetric test on an industrial robot, a good volumetric graph shows the robot reaching its target positions with only small, consistent errors. The points stay close to where they should be, forming a smooth and predictable pattern that reflects proper calibration and stable mechanical performance.
A bad graph looks scattered or uneven, with points drifting far from their targets or showing sudden spikes in error. This irregular pattern often indicates issues such as wear, backlash, or calibration drift, and it suggests the robot can no longer maintain reliable accuracy across its workspace.
Overall, the difference comes down to consistency and predictability: good results show tight, uniform accuracy, while bad results reveal instability and growing mechanical or calibration problems.

Repeatability

Global joint
A global joint repeatability test using the RCS L-90 evaluates how consistently the robot can return to commanded positions across all joints working together, rather than isolating a single axis. This provides a holistic assessment of the robot's mechanical health, revealing overall system stability, wear, and the cumulative effect of backlash, drift, or mechanical degradation across the full kinematic chain.
Global repeatability testing is a standard part of preventative maintenance and health check routines for ensuring the robot is still performing to its established baseline. You should test a robot's global joint repeatability before assessing each joint individually.
Checking your robot's global repeatability gives you an overall understanding of the whole robot diagnosis before analysing individual joint performance.
Single joint
A single joint repeatability test with the RCS L-90 is performed to verify how consistently an individual robot axis can return to the same commanded position over multiple cycles. This test isolates one joint at a time, allowing you to assess mechanical health, backlash, drift, or wear specific to that axis rather than the robot as a whole.
The RCS Software Suite guides the robot through controlled movements using the L-90 ballbar, capturing highly precise encoder-based measurements to evaluate the repeatability of the selected joint under consistent conditions.
If the results show reduced repeatability, such as increasing variance in the joint's ability to return to the same position, this suggests mechanical degradation, backlash, or joint specific offset errors. These insights allow maintenance teams to take targeted corrective action, such as joint offset recovery, re-mastering, mechanical adjustment, or scheduling a service intervention.
Since single joint repeatability also appears in typical preventative maintenance routines, poor results may indicate that further checks (e.g. global repeatability, TCP set-up verification, or joint offset recovery) are required to restore the robot's baseline performance
Repeatability results
If global repeatability results show increasing variation in the robot's ability to hit the same positions across different cycles, this indicates systemic accuracy deterioration rather than an issue with a single joint. Such findings can point to problems like compounded backlash, joint offset drift, or general mechanical wear. Depending on the severity, interventions may include re-mastering, joint offset recovery, targeted mechanical servicing, or a deeper diagnostic workflow (e.g., single joint repeatability or volumetric testing) to pinpoint the source of error.
A graph showing good repeatability appears as a narrow, almost flat band, where the variation between repeated movements is extremely small and remains stable over time. There should be no visible drift or trend in any direction.
Poor global repeatability typically triggers follow up checks and may require scheduling a maintenance call out to restore the robot to a reliable operating state. This can be seen on graphs that show a wider distribution of plots meaning the robot does not reliably return to the same position from one attempt to the next. If shown as a time series, the repeatability band appears thick and irregular, with sudden spikes or fluctuations. You may also see drift, where the cluster of points gradually moves in one direction, or a noticeable bias, such as the robot consistently stopping short or overshooting.




Joint offset test

| Joint | Offset (°) |
| 1 | 0.0000 |
| 2 | -0.0096 |
| 3 | 0.0042 |
| 4 | -0.0359 |
| 5 | 0.0000 |
| 6 | 0.0000 |
If the diagnostic results reveal significant joint offset deviation, the robot may exhibit poor accuracy, drift, or compounding errors across multiple movements. In this case, corrective intervention may include re-mastering the robot, performing a full joint offset recovery (typically with an RCS T-90), or undertaking additional tests such as single joint repeatability or global repeatability to pinpoint the source of the error.
Identifying joint offset errors early helps prevent downstream problems and reduces unplanned downtime by allowing the robot to be returned to a true, known state before further degradation occurs.
Tool frame verification

If the tool frame verification shows that the TCP does not remain stable during robot motion, it indicates that the defined tool frame is no longer accurate. This could be caused by mechanical wear, loose tooling, incorrect measurement during initial set-up, or drift over time. Depending on the severity, the required intervention might include re teaching the tool frame, tightening or replacing end of arm tooling, checking for joint backlash through repeatability tests, or running additional diagnostics (such as volumetric or global repeatability tests) to determine whether the issue is local to the tool or symptomatic of broader robot performance degradation.


Discover RCS product series
Explore the RCS product series to see how each solution is designed to address specific challenges in robot accuracy, health, and calibration. Discover the tools that fit your needs and how they work together to support reliable, high-performance robotics.
Contact our sales team today
Complete the form below to find out more information and speak to an expert.