Navigation
Connecting the UCC2 or UCC2-2 to a CMM
The purpose of this chapter is to describe the various connections available within the UCC2 or UCC2-2 design to enable connection to a CMM.
This section reviews each UCC2 or UCC2-2 connection and gives comments on the preferred methods and available alternatives.
Suggested wiring to the servo power amplifier connection
Figure 1:
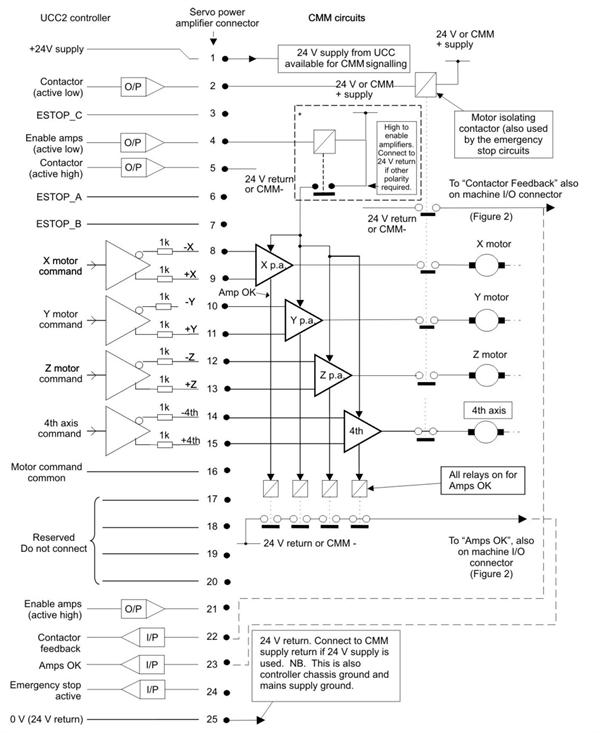
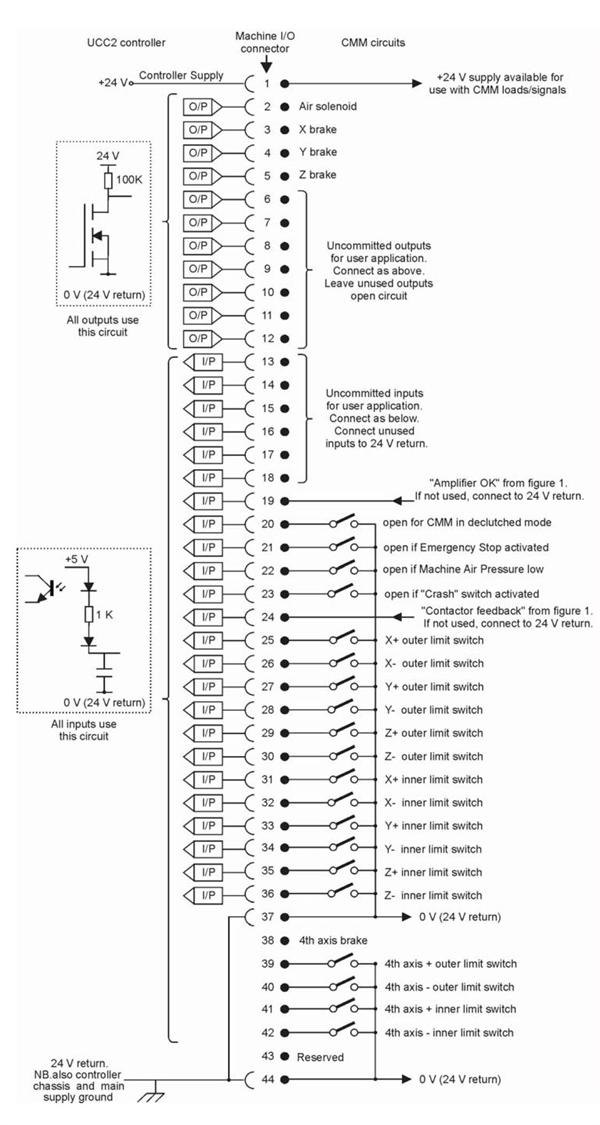
Figure 2:
The controller's 24 V supply
This supply is available at both the servo power amplifier connector and the machine's I/O connector for use by the CMM signalling circuits. It has low current rating and is thus not suitable for heavy loads.
Please use semiconductors or relays to interface with high power loads or to those which need electrical isolation.
All inputs and outputs (excepting the optically isolated amp control signals) are referenced to this supply.
It is not a floating supply, the 24 V return line is connected to the controller's chassis and to the mains supply protective ground at a star point within the controller.
If there are any interconnections between this supply and any of the CMM's supplies, there is a possibility that an additional path to ground may be created.
A separate supply of similar voltage may be used for signalling purposes in place of the controller's 24 V supply but its negative rail must be connected to the controller's 24 V return line.
Motor engagement via SPA connector
The controller will begin to engage the servo motors when instructed to do so by the host computer, if all the operating functions are in a safe or acceptable condition.
Listed below are possible causes for the motor engagement to fail:
- The system has not yet been configured for motion (i.e. the machine, servo and move parameters have not been sent to the controller)
- A fatal fault has been detected
- The emergency stop system has been activated
- A PICS ‘stop' signal is detected within the system
- The amplifier OK signal not asserted
- An open limit switch
- A present or previously present scale reading fault
The process is in two stages, amplifier enabling and contactor energising, with protective delays between each stage.
Amplifier enabling
The ‘amps OK' signal produced by the amplifier control circuits is an indication to the UCC2 controller that the servo power amplifiers are not faulty.
The controller will first ensure that all its motor demand signals are zero and will then try to enable the power amplifiers by asserting the ‘enable amps‘ signal (Figure 1 - servo power amplifier connector pin 4 or 5). See 'General wiring standards' for its electrical ratings.
This “enable amps”, signal will be held on for 0.1 second to allow the ‘amps OK' signal, from the servo power amplifier, to become valid. If this signal does not become valid (i.e. pin 19 of the machine I/O connector is not pulled low) the controller will abandon the engagement process. If no error is detected then the controller will wait for a further period of 1 second before beginning the next stage, to allow the amplifiers to settle after any initial transients.
Figure 1 is an example of the recommended circuits that can be used to drive the power amplifier enable inputs and to generate the amps OK signal shown. The circuits that are used in the installation will vary depending on the amplifiers' requirements but must pull the ‘amps OK' input (pin 19) down if all amplifiers are operating correctly.
If the user wishes to signal amplifier failures individually to the main computer, it is recommended that the uncommitted user inputs (Figure 2 - machine I/O connector) are used for this purpose.
If the installer of the CMM makes the decision that the amplifier enabling function is not needed, the ‘Enable amps (active low)' signal could be connected directly to the ‘amps OK' input signal. This will provide immediate feedback to the controller during the amplifier enabling process and permit the next stage to begin.
NOTE: This method is not recommended.
Contactor energising
After establishing that the amplifiers are working correctly, the controller will take the “contactor” signal (pin 2 of the servo power amplifier connector) low, this should be used to signal the servo power amplifier to apply power to the motors. The controller will keep this output signal low for 0.2 of a second during which it expects the ‘contactor feedback' input (machine I/O connector pin 24) to be pulled low to indicate that the motors are now powered.
If the ‘contactor feedback' signal is not received in time, the contactor (pin 2 ) and the amp control signals (pins 4+5) are turned off and the motor engagement process is stopped.
If the ‘contactor feedback' signal is received within this 0.2 second window, the controller keeps all motor commands at zero for another 1.0 second before allowing the servo system to begin operating. This is intended to give further protection against sudden machine movements when engaging the motors
If the installer of the CMM makes the decision that the contactor energising function is not needed, the ‘contactor' signal (pin 2) can be joined to the ‘contactor feedback' input signal (pin 22). This will provide immediate feedback to the controller during the contactor energising process and permit the next stage to begin.
NOTE: This method is not recommended.
Motor command signals
The UCC2 controller generates complementary motor velocity command signals for each axis (X axis = pins 8+9, Y axis = pins 10+11, Z axis = pins 12+13, 4th axis = pins 14+15).
Each motor velocity signal is capable of a swing of +/-10 V centred on a zero velocity command of 0 V. A motor “command common” connection is provided to define this 0 V level (servo power amplifier connector, pin 16, figure 1).
The motor command common signal is also connected to the 24 V supply return, the controller chassis and the mains supply protective ground at a star point within the controller. Care may be required in its application.
If complementary signals are not required, either of the motor command signals may be used as a single ended input, referred to the motor “command common” line.
Each motor command signal has a series resistor of 1k ohm to protect the controller from inadvertent damage and this will reduce the drive signal to the power amplifiers if their inputs are of low impedance. The UCCassist-2 will compensate for this automatically.
Motor command polarity
For each axis, the motor command +ve pin will go negative with respect to the command common line to produce a positive change of position.
The motor command -ve pin will go positive at the same time.
Brakes
The brake on a CMM is a mechanism to prevent that axis from moving when it is already stationary, it is not there to slow an axis down.
These outputs are used to disengage the CMM axis brakes (if fitted). The output becomes active as soon as the CMM servos are engaged.
It is possible to set delays for the release and application of the brakes. These delays are applied equally to all of the brake outputs.
- Release delay is the time between de-activating the brake outputs and allowing motion requests occurring during engagement.
- Apply delay is the time between servo disengagement and activating the brake outputs.
Air solenoid
This output signal is used to activate the CMM main air supply solenoid (if fitted). The output becomes active as soon as a downloadable is sent to the UCC2 controller. If the controller is reset or switched off the air solenoid will be de-energised disconnecting the CMM air supply .
Switched outputs
The UCC2 has the following uncommitted switched outputs, please refer to outputs section for details.
There are seven uncommitted outputs available on the UCC2 I/O connector, pins 6 to 12 are allocated to be outputs 0 to 6 consecutively. The UCC does not directly control these outputs, it merely acts as a post-box. These outputs are controlled from the application software package via command 318 “Write to controller port”.
These switched outputs are pulled up to the 24 V rail by a 20 k ohm resistor when inactive, and will be pulled down to the 24 V return line via an NPN transistor when activated. There is an excess voltage protective diode fitted internally to the controller.
The outputs can be activated by a command from the main computer to the controller. If not being used they should be left open circuit.
Switched inputs
The UCC2 has the following controller switch inputs, please refer to 'Machine I/O connector' for details:
There are six uncommitted inputs available on the UCC2 I/O connector, pins 13 to 18 are allocated to be inputs 0 to 5 consecutively. The UCC does not directly read these inputs, it merely acts as a post-box. These inputs are read by the application software package via command 279 “Read from controller ports”.
The controller provides 29 inputs of this type. See 'Connectors and signals' for their electrical ratings.
Each input is connected to an LED fed from the +24 V rail, and is activated by being pulled down to the 24 V return line. The LED is part of an opto-coupler which is used to give the controller some isolation from unwanted electrical signals on the input wiring.
Limit switches
Sixteen inputs are allocated to limit switch signals, 8 inner and 8 outer. When a limit switch is not activated (i.e. the machine is within its working range) these inputs should be connected to the 24 V return line by the limit switch contacts. If the machine installation does not require the connection of the limit switches the signals must be connected to the 24 V return line.
NOTE: Limit switches should be installed such that they will not be damaged in the event of overtravel. Where necessary for safety related functions, they should be of the direct (or positive) operating type to IEC 60947-5-1).
Amplifier OK and contactor feedback
The ‘amplifier OK' and the ‘contactor feedback' inputs have been discussed in 'Motor engagement via SPA connector'.
Fatal fault
Three ‘Fatal Fault' inputs are provided: emergency stop, machine air pressure low and a ‘Crash Switch' input. This last is intended for use with a sensing mechanism which detects an unintended contact between the machine's moving and fixed components. The controller monitors these inputs and will stop the motors if one or more input goes open circuit or high. If not required these inputs should be connected to the 24 V return line.
NOTE: The ‘emergency stop' input is not a primary safety device, although the controller will stop the motors as far as it can. Its main use is to allow the controller to inform the main computer, and hence the operator, of the ‘emergency stop' switch actuation. In addition it will prevent motor re-engagement if the ‘emergency stop' switch is still activated. Where an electromechanical controlled emergency stop is required, to IEC/ EN60204-1 category 0, it must be separately provided and external to the UCC2.
Declutched mode
The ‘CMM in declutched mode' input is intended to tell the controller that the driving motors are mechanically disconnected from the machine, and that the machine may be moved by some other means, e.g. by hand. In this state, the motor commands will be kept at zero velocity until the machine clutches are re-engaged, at which time the controller will resume servo control at the new machine position. For normal servo operation, this input should be pulled down to the 24 V return line. If this function is not required, the input should be connected to the 24 V return line.
Uncommitted inputs
The remaining six inputs are uncommitted and may be used as required. These signals are not used by the controller and are simply passed to the main computer, on request. If not required these inputs should be connected to the 24 V return line.