Navigation
Technical terminology
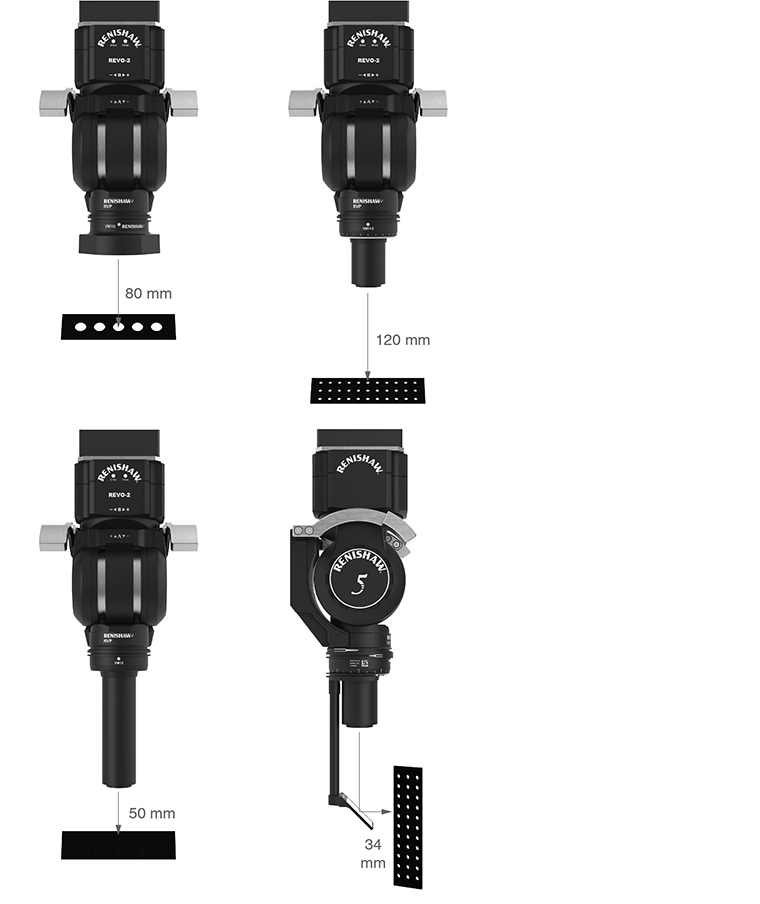
Stand-off
This is the distance between the end of the vision module and the plane at which a feature will be at the sharpest focal distance to provide optimum image capture.
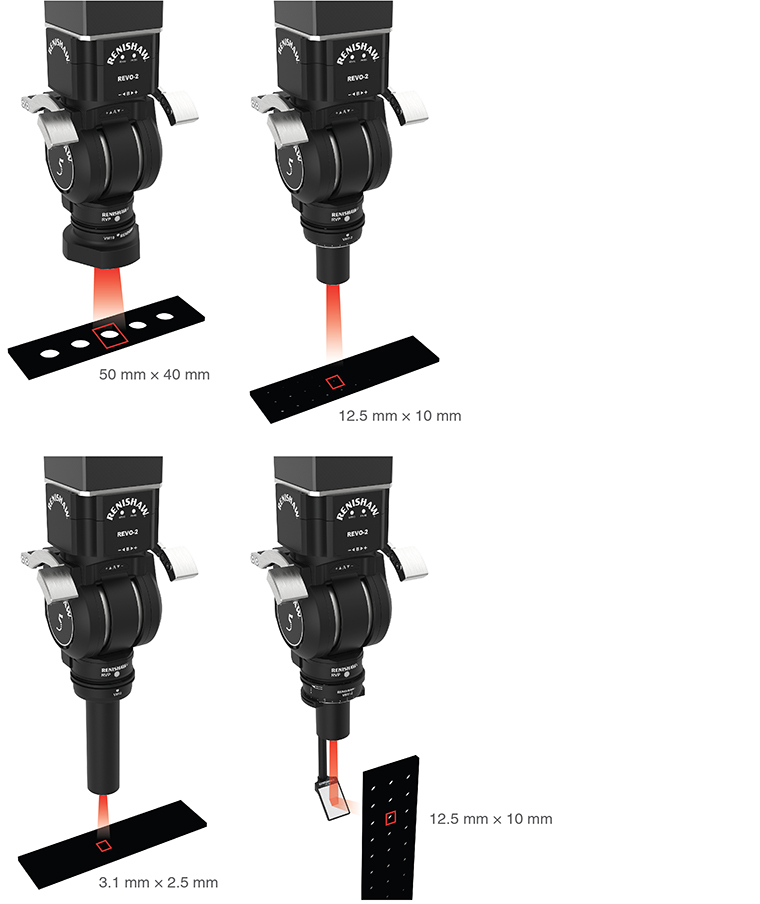
Field of view
This is the maximum size area that will be projected onto the CMOS sensor when the correct stand-off distance is used. Any feature requiring inspection with RVP must be located within the field of view to allow inspection.
Depth of field
The depth of field specifies the range over which a feature can deviate from the nominal stand-off distance and still be measured with acceptable levels of metrology performance. If features are measured outside the recommended depth of field range, metrology performance and accuracy will decrease.
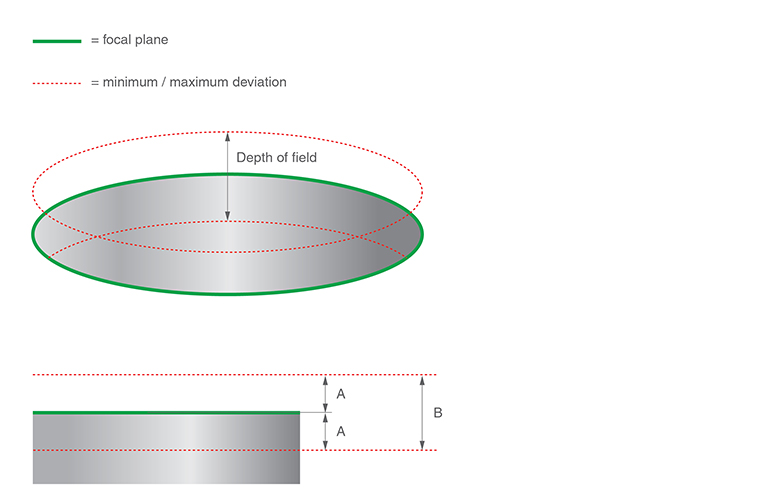
| VM10 | VM11-2 | VM12 | |
| A | 2.5 mm | 2.5 mm | 0.1 mm |
| B | 5 mm | 5 mm | 0.2 mm |